
The problem with ground control at sea
Most uncrewed vessel programmes start the same way. Hull designed, propulsion proven, autopilot tuned. Then the vehicle goes over the horizon and the real problem starts: everything between your autopilot and your operators.
Something goes wrong: a contact closing, a vehicle dragging off station, weather arriving early. Your operator has the route in one tool, traffic in a second tab, weather in a third, tides in a fourth, and manual control somewhere else again. Every tab is a context switch, and a context switch costs time you do not have. At sea, you need the full picture and a hand on the helm within seconds.
Building that yourself means bathymetric charts, live global and local AIS, weather and tide feeds, position alarms and a control loop over satellite: an engineering team and a year you did not budget, and none of it is the vehicle you sell. Open-source ground control was built for aircraft: run it on a boat and station keeping drifts, and your customer judges a six-figure vehicle by the hobbyist screen it is flown from.
Meet Tether, your mission control
Tether is the software: the ground control station we built for our own Scout USV fleet, running in any browser. Plan missions, hold station, command swarms and take manual control, with the whole operating picture on one screen. Tether Bridge is the hardware that puts your vehicles on it, in your branding if you want it, on your servers if you need it. It works with any boat running ArduPilot, PX4 or another MAVLink autopilot.
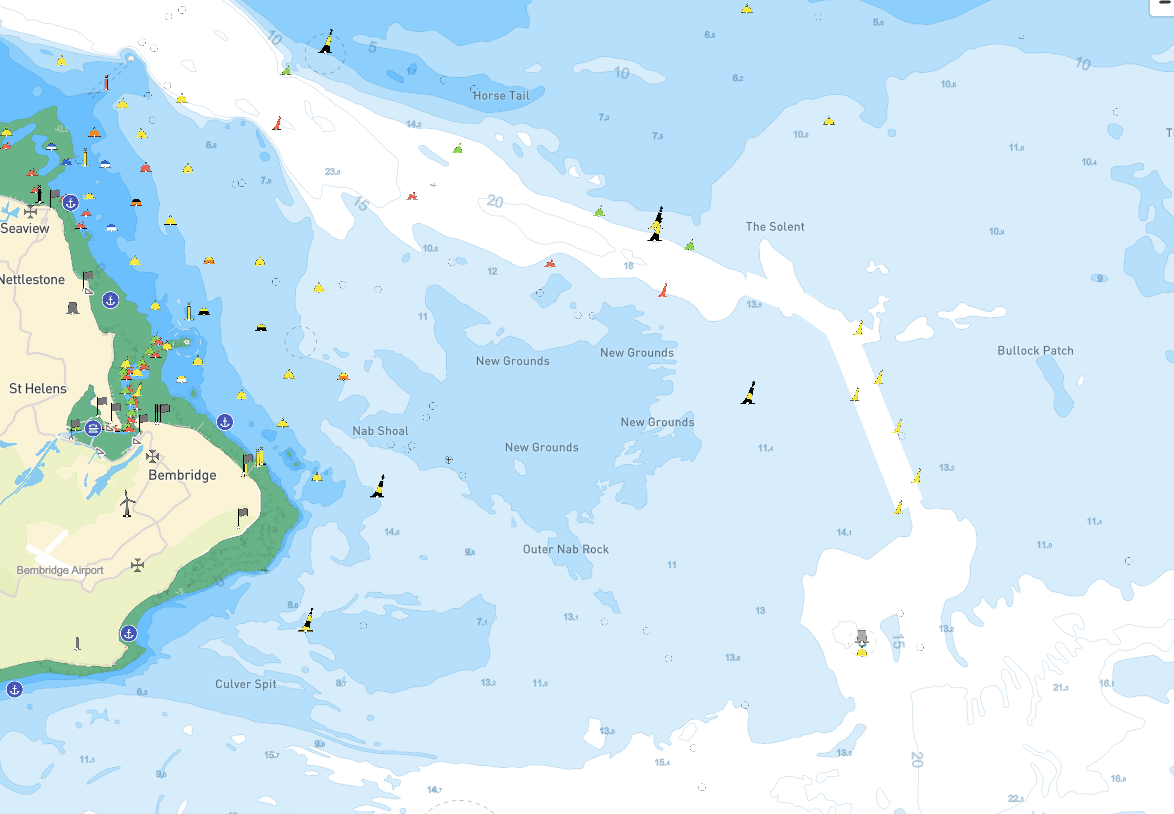
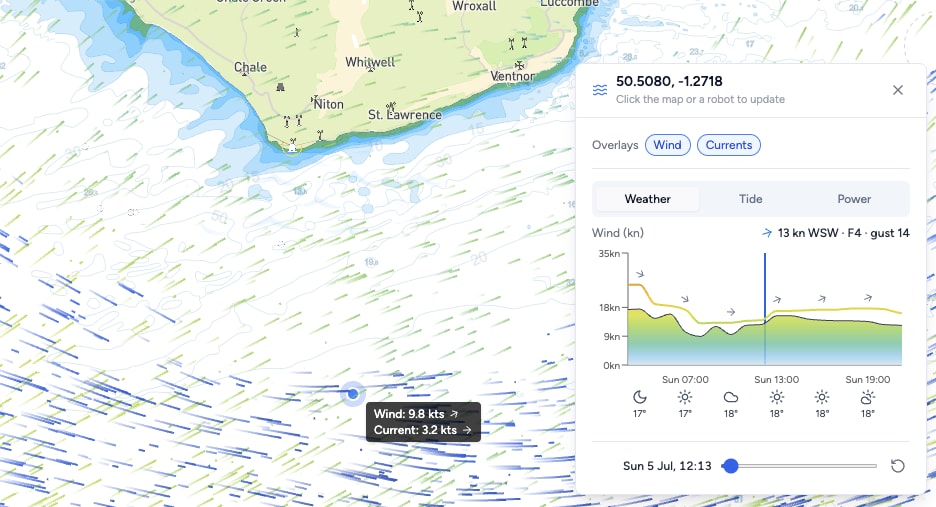
- Full context - bathymetry, live global and local AIS, weather, winds and tides in the planner
- Your layers - custom overlays, plus what each vehicle's sensors see, plotted where they see it
- Autonomous or manual - missions, swarm control and manual piloting in seconds
- Position alarms - know the moment a vehicle is not where it should be
- Multi-user - the whole ops team on the same live picture
One operating picture
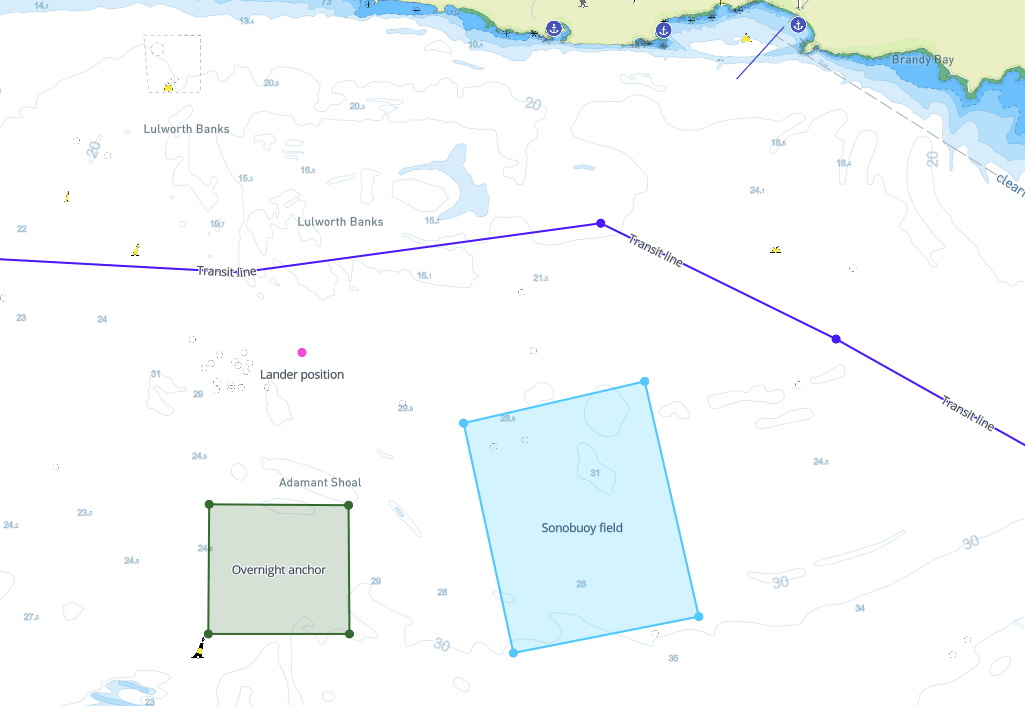
Tether puts every layer in the planner. Plan a transit, check the traffic, read the weather window, confirm the tide and send the mission, without leaving the screen your fleet is on. When something changes, manual control is one click away in the same view.
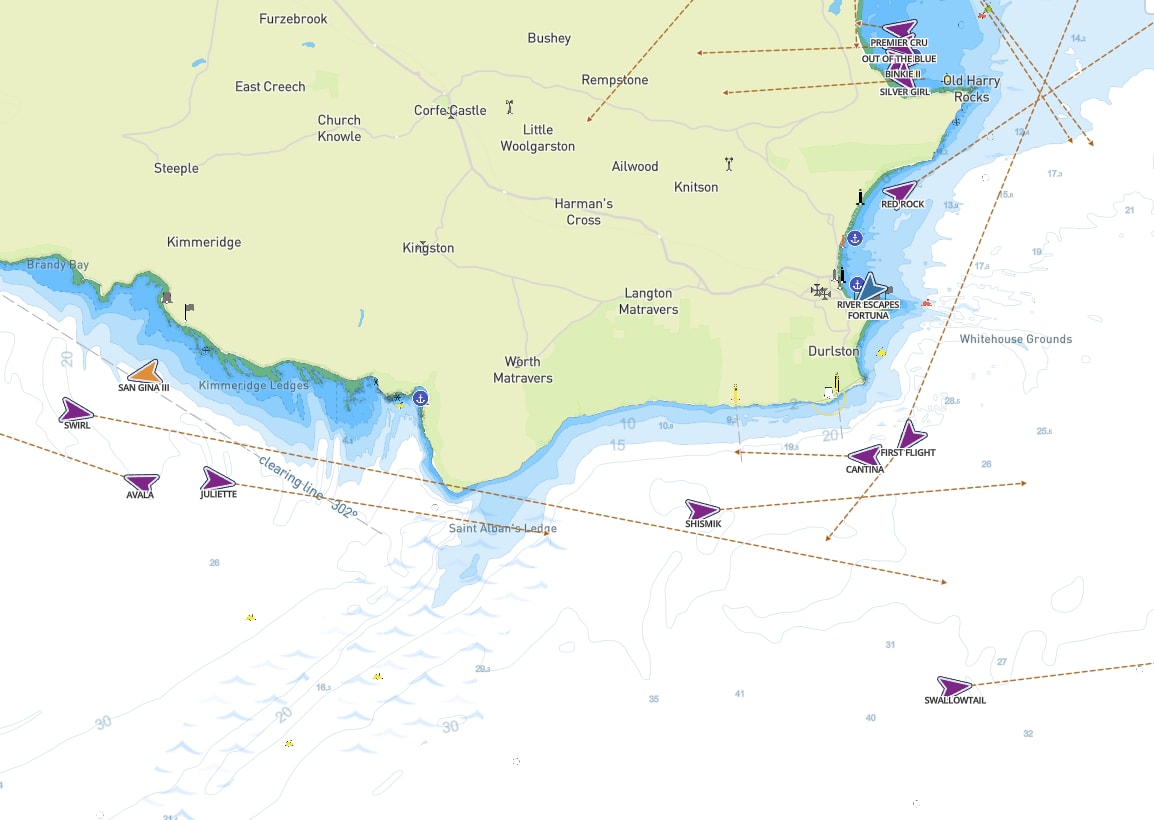
Task the fleet as one
Swarm behaviours turn many vehicles into one unit. Picket forms a screening line across an area or approach, spacing itself by vehicle count and sensor range. Convoy moves the fleet in line astern: task the lead vehicle and the rest follow at a set spacing. Cover distributes the fleet to maximise combined sensor coverage, based on each vehicle's sensors and range. Add a vehicle and the formation tightens; re-task one and the others close the gap.
Tether Bridge: one box, one cable, full control
Tether Bridge is the hardware that puts a vehicle on Tether. One cable carries power and ethernet in; serial or ethernet out to your MAVLink autopilot. Plug it in and the vehicle is on the bridge.
It carries two independent links, and each can command the vehicle on its own. Iridium is always on: low power, global, low RF, command and position around the clock. Starlink adds high bandwidth on demand: live video, telemetry and manual piloting. Run on Iridium to stay lean, wake Starlink when you need the bandwidth.
Iridium is also the fleet's low RF mode: near-silent in the spectrum, position pings from every 60 seconds to every few hours, still under full command. For operations where being heard is a liability, the fleet stays quiet and stays yours.
Power is scheduled, not just switched. Run the transit on Iridium with Starlink powered down, wake Starlink on station, and power-cycle a stuck payload from the ops room. High bandwidth when you need it, endurance when you do not.
Three ways to run it
- Internal - control your own fleet from our cloud. The fastest way to give it a bridge.
- White label - the same software with your logo and colours. Your customers see you, not us.
- On-prem - deployed on your own servers, including air-gapped networks, for defence and security programmes.
Every tier includes integration support from the team that runs its own vehicles on the same software. See it running our fleet on the Scout USV page.
Common questions
Tether is the software: a web-based ground control station for uncrewed surface vessels, running in any browser. Tether Bridge is the hardware: a box on each vehicle that connects its MAVLink autopilot to Tether over Starlink and Iridium. Together they let your USV run on Tether.
A USV ground control station (GCS) is the software operators use to plan missions for, monitor and command uncrewed surface vessels from shore or an operations centre. A maritime GCS shows charts, vessel traffic and weather, holds a vehicle on station, and lets an operator take manual control over satellite. Tether is a web-based USV ground control station; Tether Bridge is the hardware that connects your vehicle to it.
Yes. Open-source ground control was written for aircraft, so on a boat station keeping drifts, multi-vehicle support is limited, and satellite operation is a do-it-yourself project. Tether is a maritime-first alternative: vessel station keeping that holds, a whole fleet from one browser, charts, AIS, weather and tides in the planner, connected by Tether Bridge over Starlink and Iridium.
Any vehicle running a MAVLink-compatible autopilot or flight computer, including ArduPilot and PX4. Tether Bridge speaks to the autopilot over serial or ethernet: if your vehicle speaks MAVLink, Tether can plan missions, hold station and take manual control of it.
One cable carries power and ethernet into Tether Bridge. It speaks to your MAVLink autopilot over serial or ethernet, and carries two independent satellite links, Starlink and Iridium, each able to command the vehicle. It also switches and schedules power for Starlink and payloads.
Yes. Tether Bridge carries the vehicle over the horizon (BVLOS) by satellite: Iridium for always-on low-power command, and Starlink for high-bandwidth live telemetry and manual control.
Both, and they are co-equal. Iridium is always on: low power, global, low RF, command and position around the clock. Starlink adds high bandwidth on demand: live video, telemetry and manual piloting. Each can command the vehicle on its own, so losing one still leaves you in control.
Yes. Any operator with permission can take the helm from the browser, over Starlink or Iridium, and hand back to the mission when done.
A whole fleet from one browser. Tether is multi-vehicle and multi-user, and swarm behaviours (Picket, Convoy and Cover) let one operator task a group of vehicles as a single unit rather than piloting them one at a time.
Iridium-only operation. The vehicle emits almost nothing: position pings configurable from every 60 seconds to every few hours, no high-bandwidth signature, still under full command. For operations where being detected is a liability, the fleet stays quiet and stays yours.
Yes. It switches and schedules power for Starlink and your payloads: run the transit on Iridium with Starlink off, wake it on station, and power-cycle a stuck instrument from the ops room.
Yes. The white label tier carries your logo and colours, so the ground control station your customers see is yours. Your customers never see Online Oceans.
Yes. The on-prem tier deploys on your own infrastructure, including air-gapped networks, for defence and security programmes that cannot use a shared cloud.
You do. Telemetry and sensor data from your vehicles belongs to you, delivered to your dashboards or your own cloud by API.